|
Rui Wang (王锐)
I am a Senior Research Scientist at the
Microsoft Spatial AI Lab in Zurich.
Before joining Microsoft, I pursued my PhD in Computer Science
in the Computer Vision Group
at TUM, where I was advised
by Prof. Daniel Cremers.
In 2018, I did an internship in the Nvidia Robotics Research Lab in Seattle,
supervised by Prof. Dieter Fox.
In parallel with pursuing my PhD, I also worked as a Senior
Computer Vision Researcher at Artisense,
a startup co-founded by Prof. Cremers. I received my Master from
TUM and my Bachelor from Xi'an Jiaotong University.
My research interests include computer vision, machine learning and spatial AI.
If you are interested in these topics, feel free to reach out for internship and thesis opportunities.
Email /
Google Scholar /
LinkedIn /
GitHub /
Homepage@TUM
|

|

|
Technical University of Munich
PhD
Computer Science
2016-2021
|
|
|
Technical University of Munich
Master
Electrical Engineering and Information Technology
2011-2014
|

|
Xi'an Jiaotong University
Bachelor
Automation
2007-2011
|
|
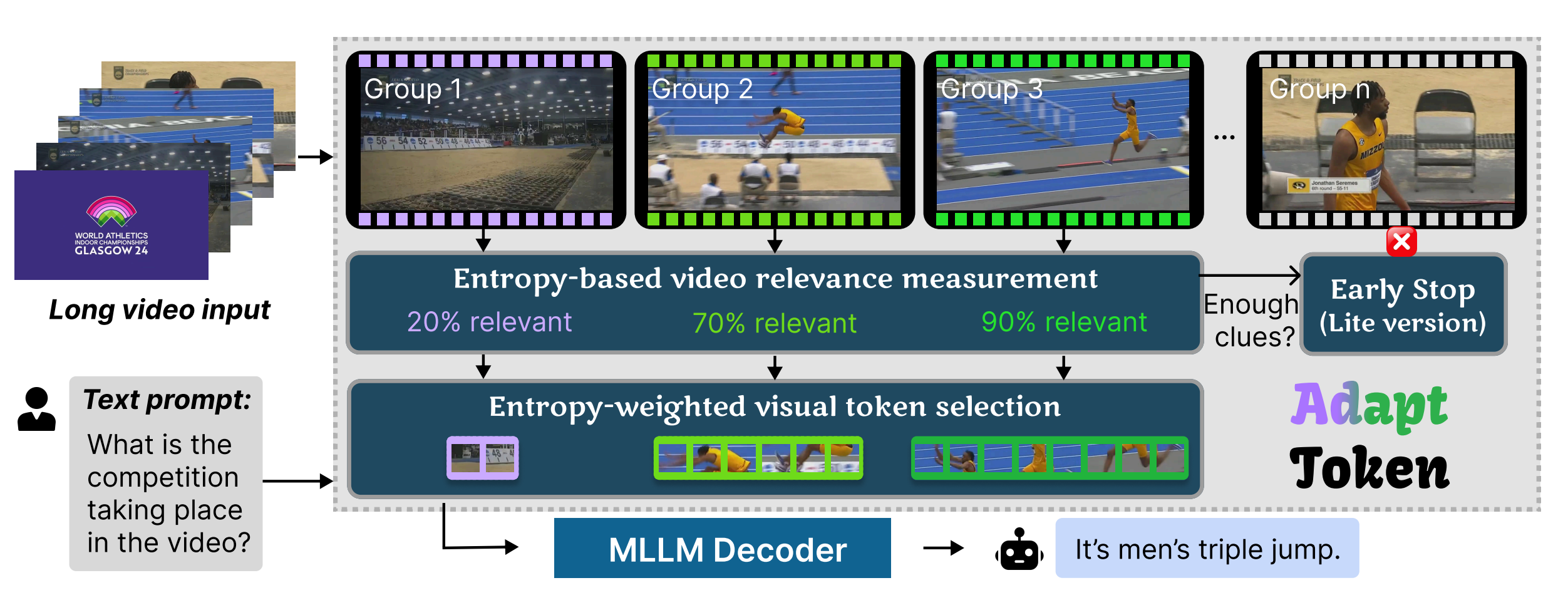
AdaptToken: Entropy-based Adaptive Token Selection for MLLM Long Video Understanding
Haozhe Qi, Kevin Qu, Mahdi Rad, Rui Wang, Alexander Mathis, Marc Pollefeys
arxiv, 2026
paper |
project page |
code
|
|
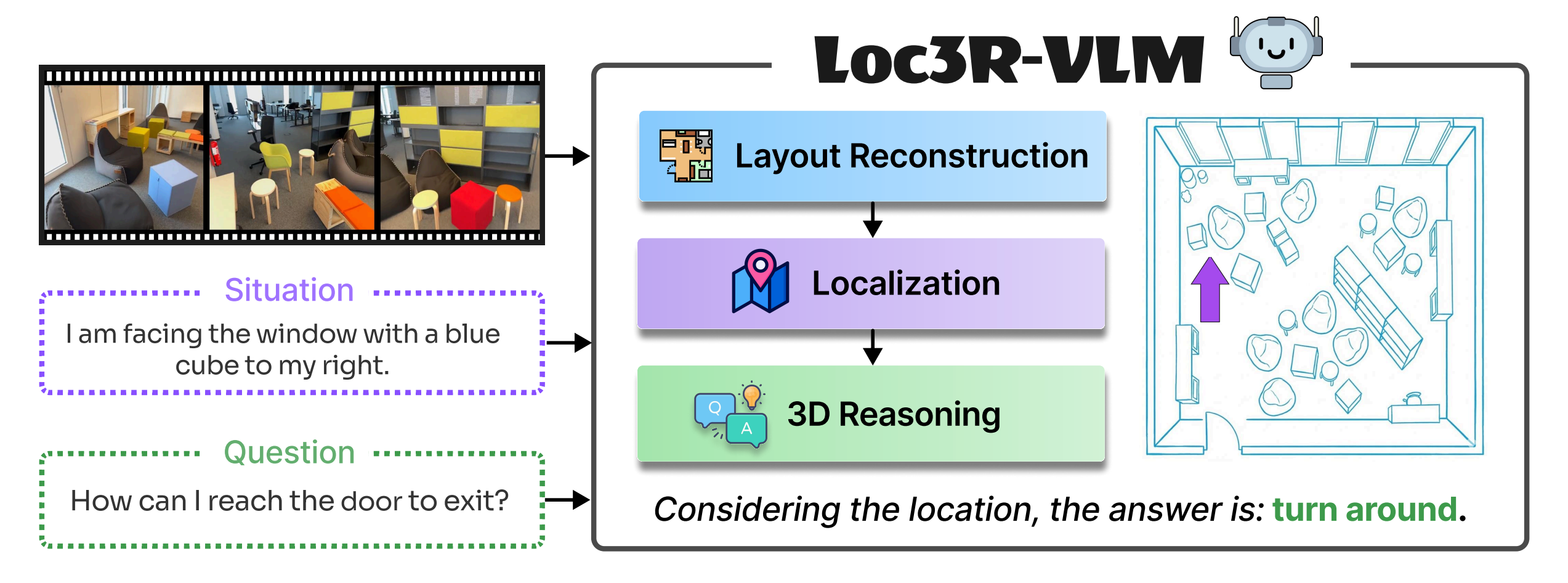
Loc3R-VLM: Language-based Localization and 3D Reasoning with Vision-Language Models
Kevin Qu, Haozhe Qi, Mihai Dusmanu, Mahdi Rad, Rui Wang, Marc Pollefeys
arxiv, 2026
paper |
project page |
code
|
|
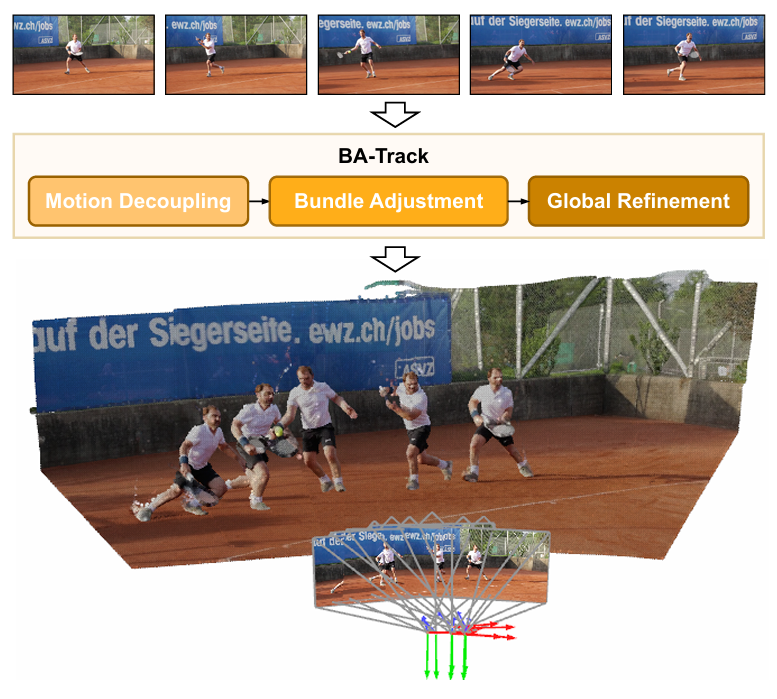
Back on Track: Bundle Adjustment for Dynamic Scene Reconstruction
Weirong Chen, Ganlin Zhang, Felix Wimbauer, Rui Wang, Nikita Araslanov, Andrea Vedaldi, Daniel Cremers
ICCV, 2025 (Oral Presentation, Award Candidate)
paper |
project page |
code
|
|
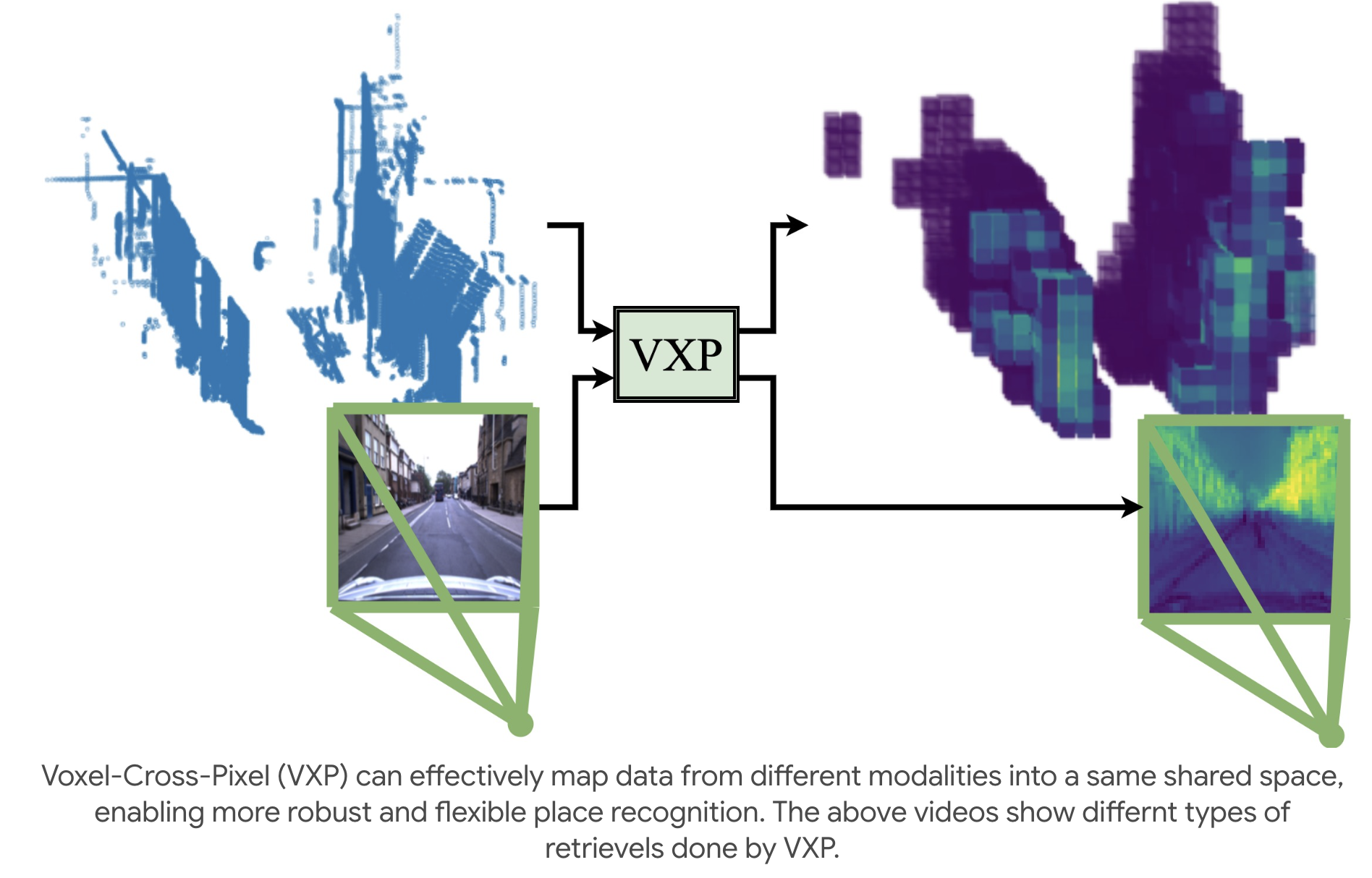
VXP: Voxel-Cross-Pixel Large-scale Image-LiDAR Place Recognition
Yun-Jin Li, Mariia Gladkova, Yan Xia, Rui Wang, Daniel Cremers
3DV, 2025
paper |
project page |
code
|
|
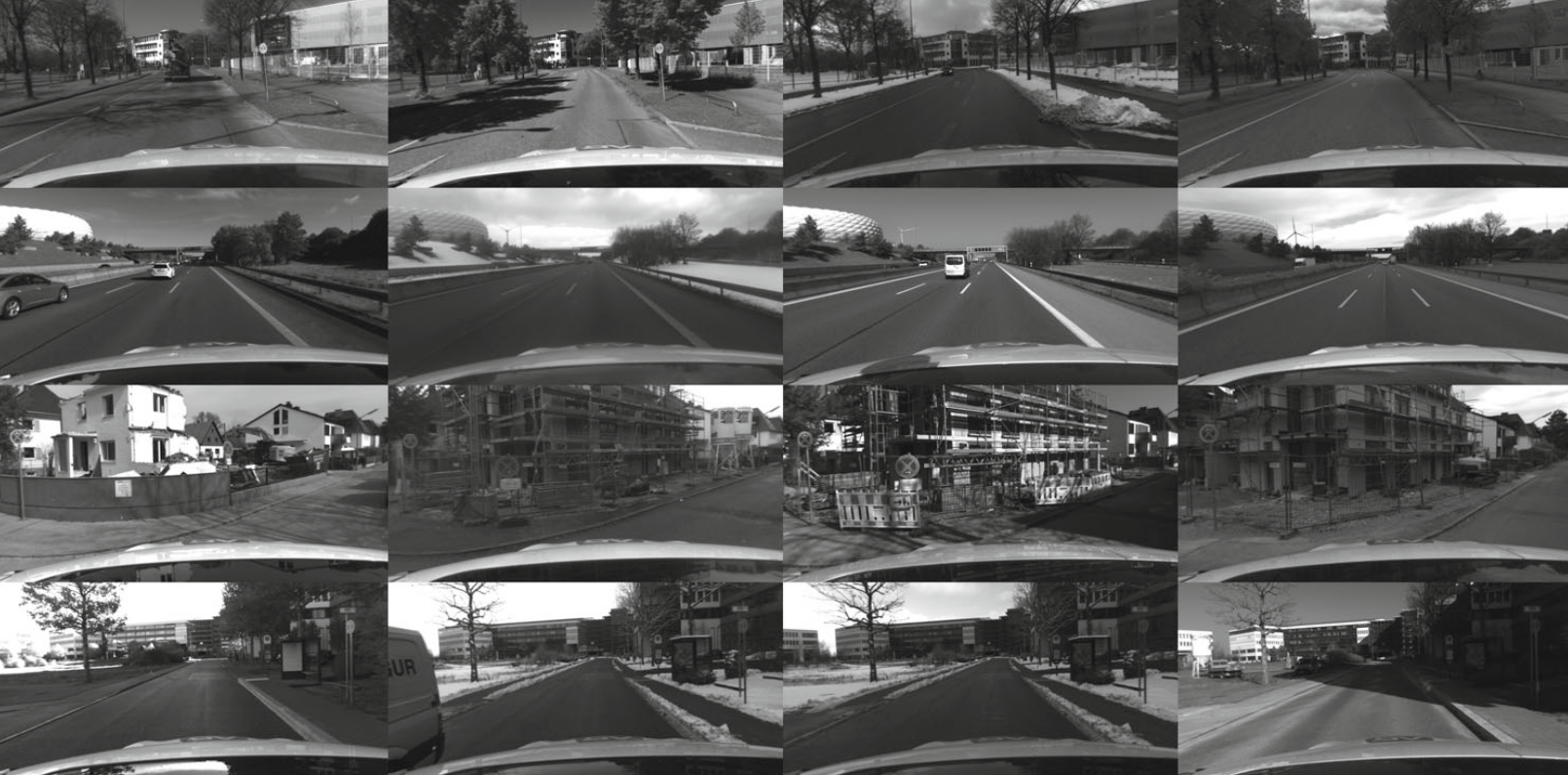
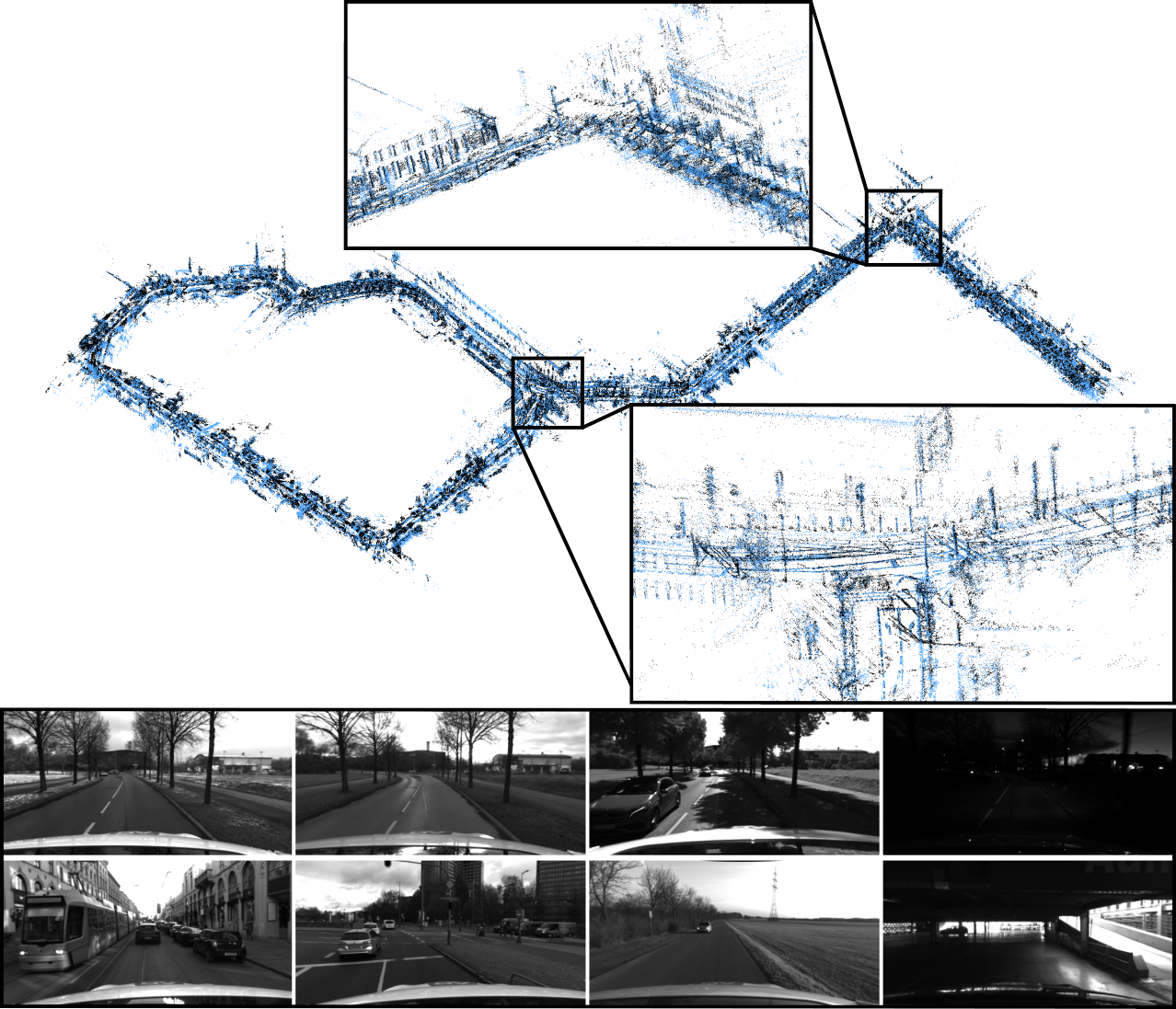
4Seasons: Benchmarking Visual SLAM and Long-Term Localization for Autonomous Driving in Challenging Conditions
Patrick Wenzel, Nan Yang, Rui Wang, Niclas Zeller, Daniel Cremers
IJCV, 2024
paper
|
|
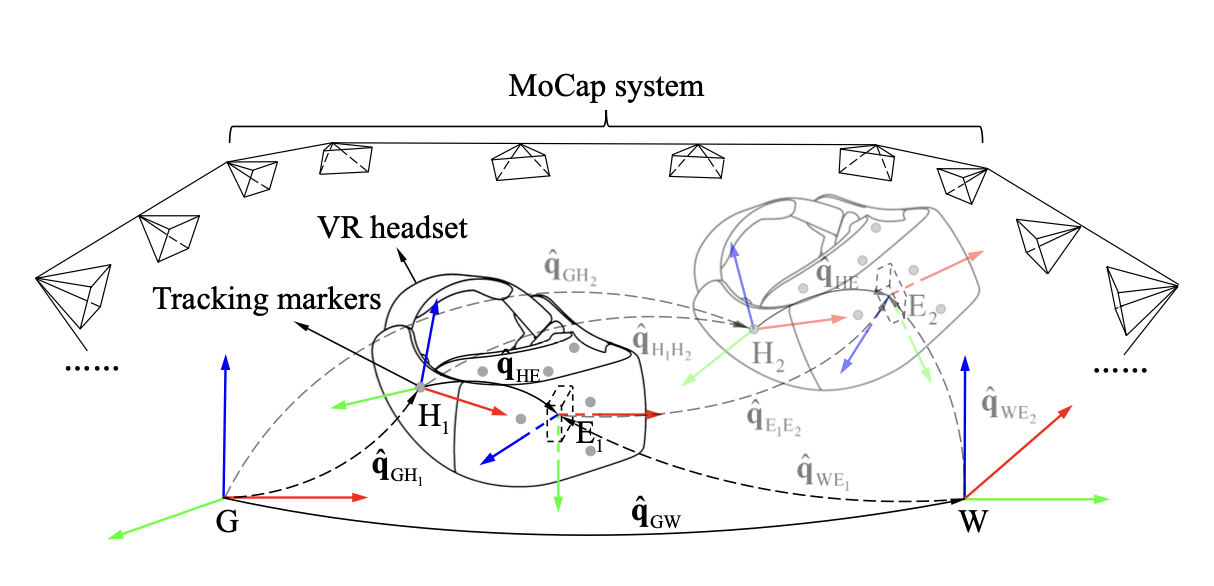
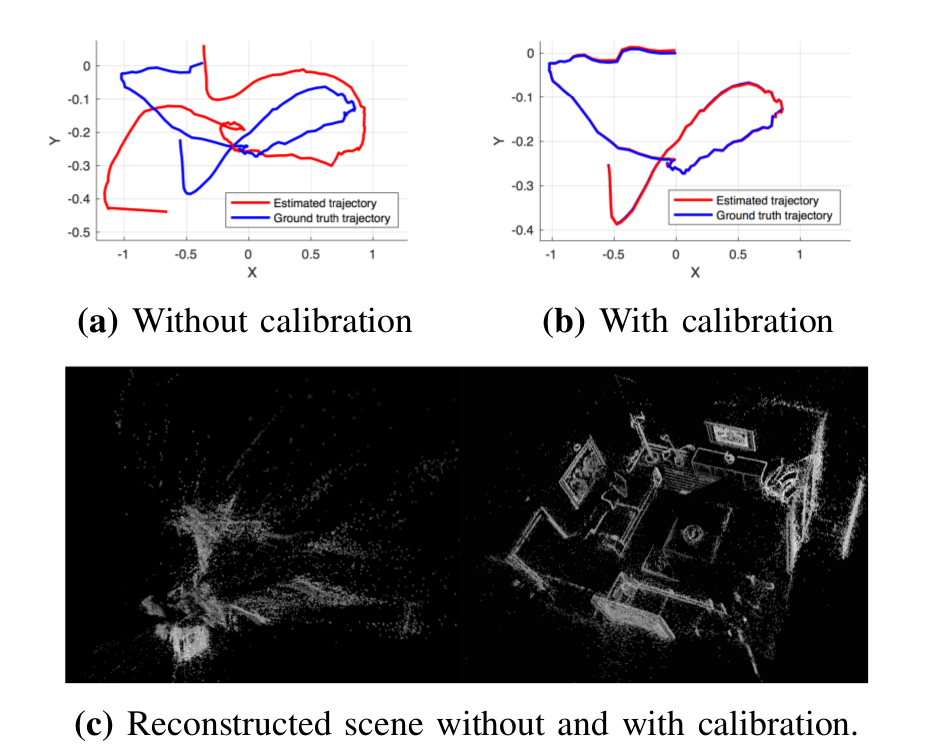
A Spatiotemporal Hand-Eye Calibration for Trajectory Alignment in Visual(-Inertial) Odometry Evaluation
Zichao Shu, Lijun Li, Rui Wang, Zetao Chen
RA-L, 2024
paper
|
|
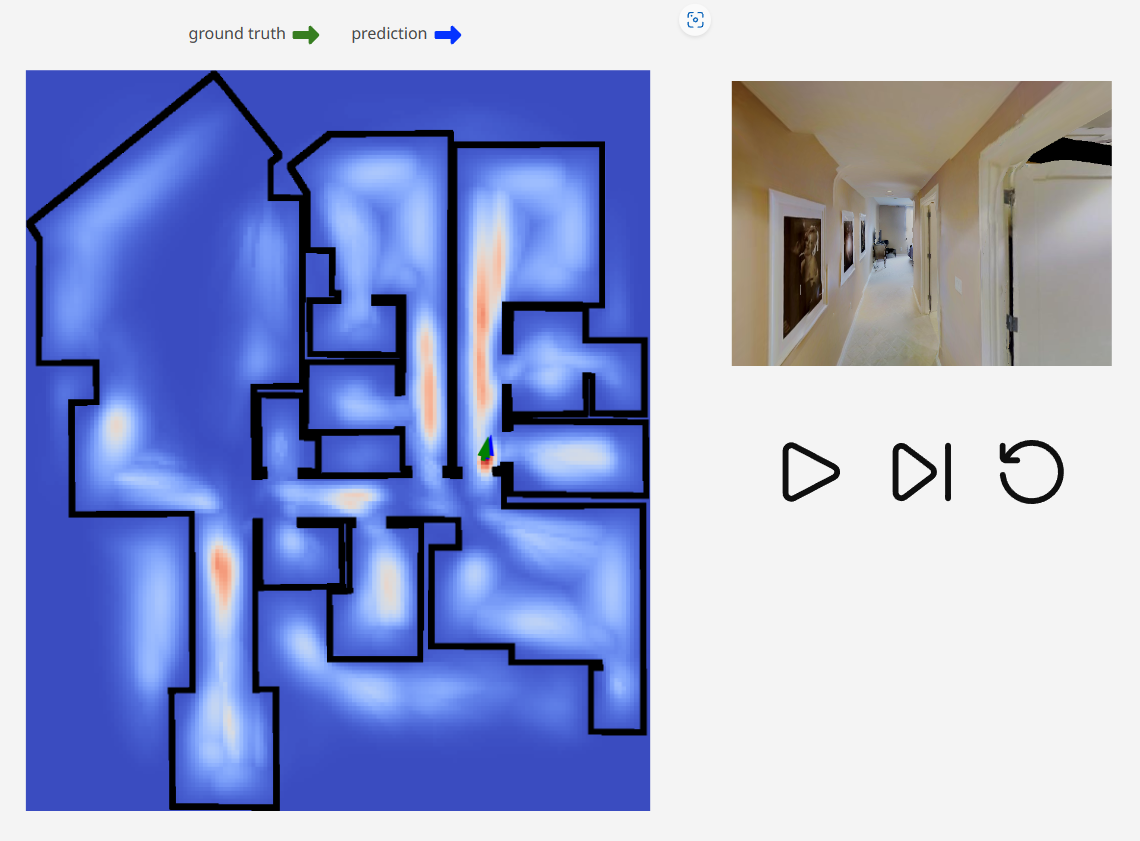
F3Loc: Fusion and Filtering for Floorplan Localization
Changan Chen, Rui Wang, Christoph Vogel, Marc Pollefeys
CVPR, 2024 (Highlight)
paper |
project page |
code |
dataset
|
|
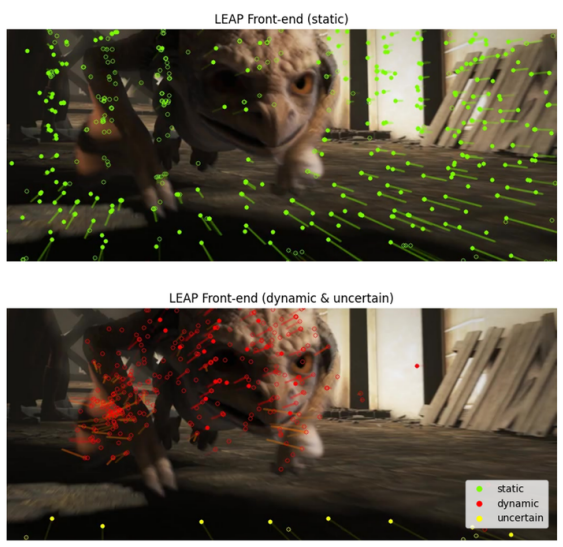
LEAP-VO: Long-term Effective Any Point Tracking for Visual Odometry
Weirong Chen, Le Chen, Rui Wang, Marc Pollefeys
CVPR, 2024
paper |
project page |
code
|
|
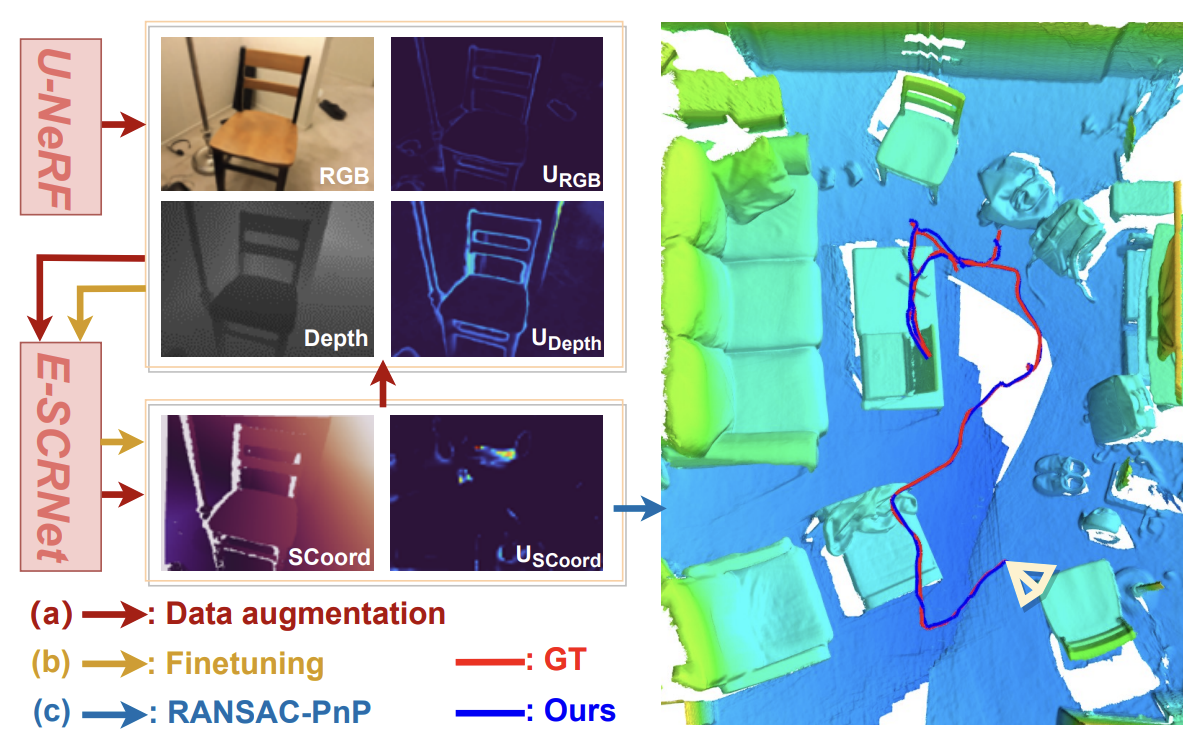
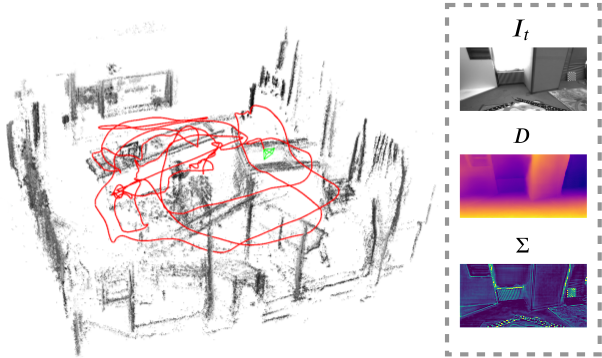
Leveraging Neural Radiance Fields for Uncertainty-Aware Visual Localization
Le Chen, Weirong Chen, Rui Wang, Marc Pollefeys
ICRA, 2024
paper |
video
|
|
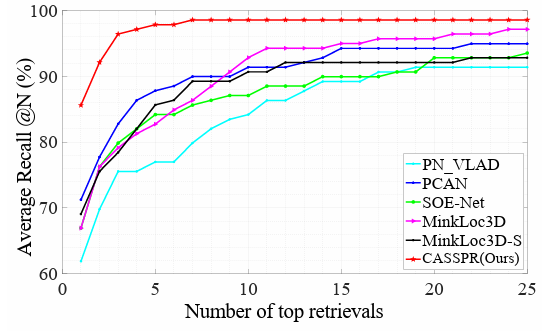
CASSPR: Cross Attention Single Scan Place Recognition
Yan Xia, Mariia Gladkova, Rui Wang, Qianyun Li, Uwe Stilla, Joao F Henriques, Daniel Cremers
ICCV, 2023
paper |
code
|
|
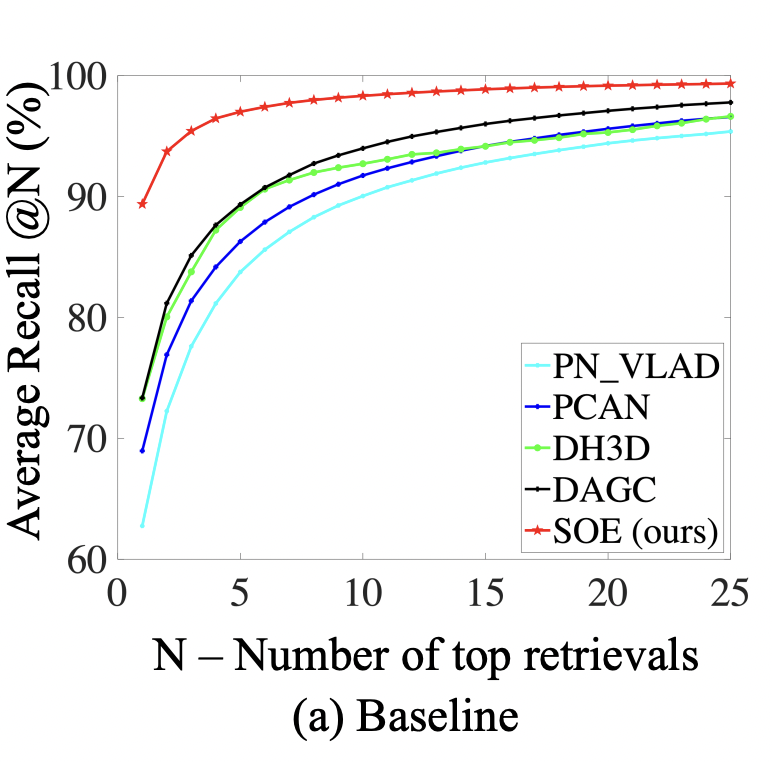
SOE-Net: A Self-Attention and Orientation Encoding Network for Point Cloud based Place Recognition
Yan Xia, Yusheng Xu, Shuang Li, Rui Wang, Juan Du, Daniel Cremers, Uwe Stilla
CVPR, 2021 (Oral Presentation)
paper |
code
|
|
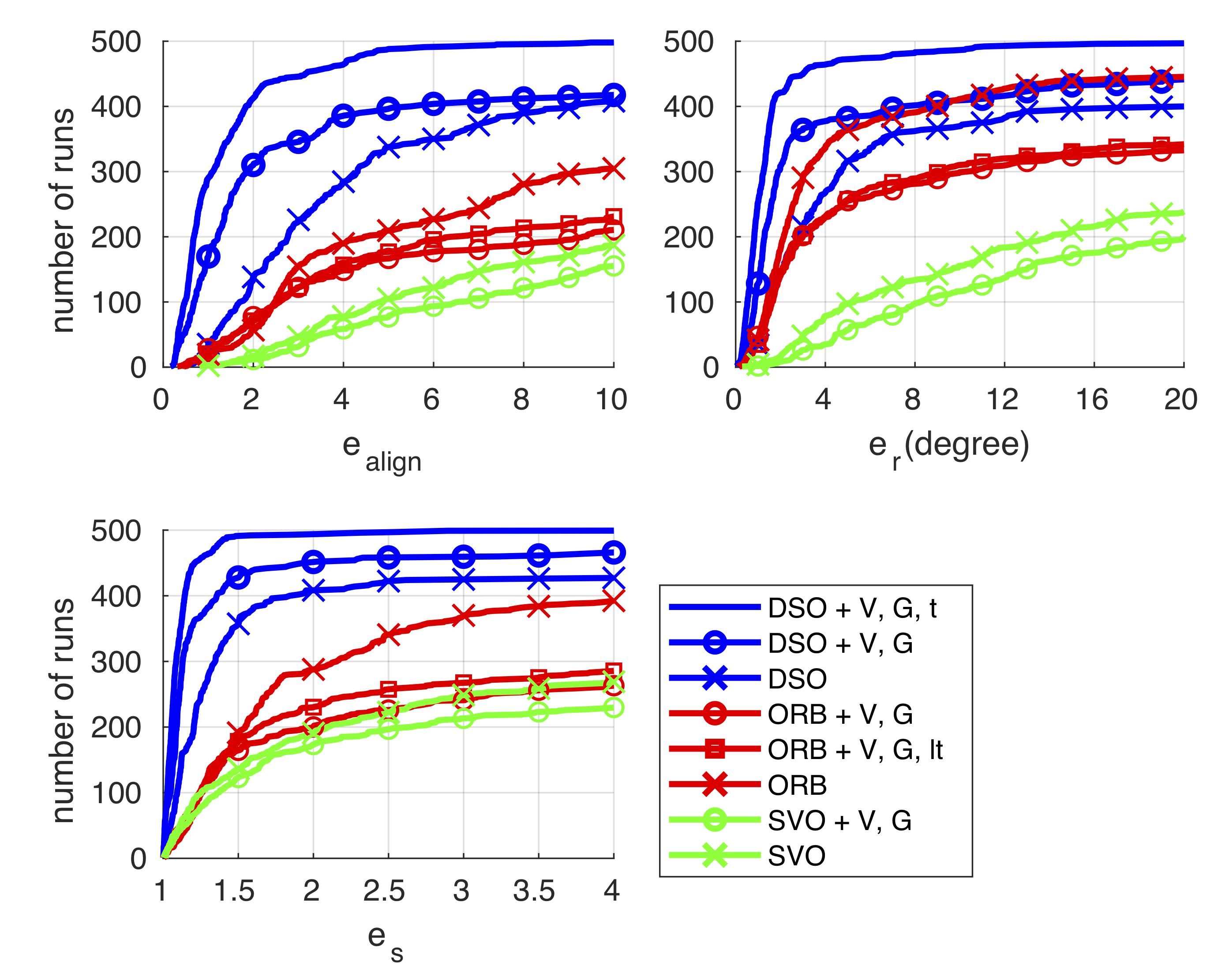
Tight Integration of Feature-based Relocalization in Monocular Direct Visual Odometry
Mariia Gladkova, Rui Wang, Niclas Zeller, Daniel Cremers
ICRA, 2021
paper |
project page |
video |
teaser video
|
|
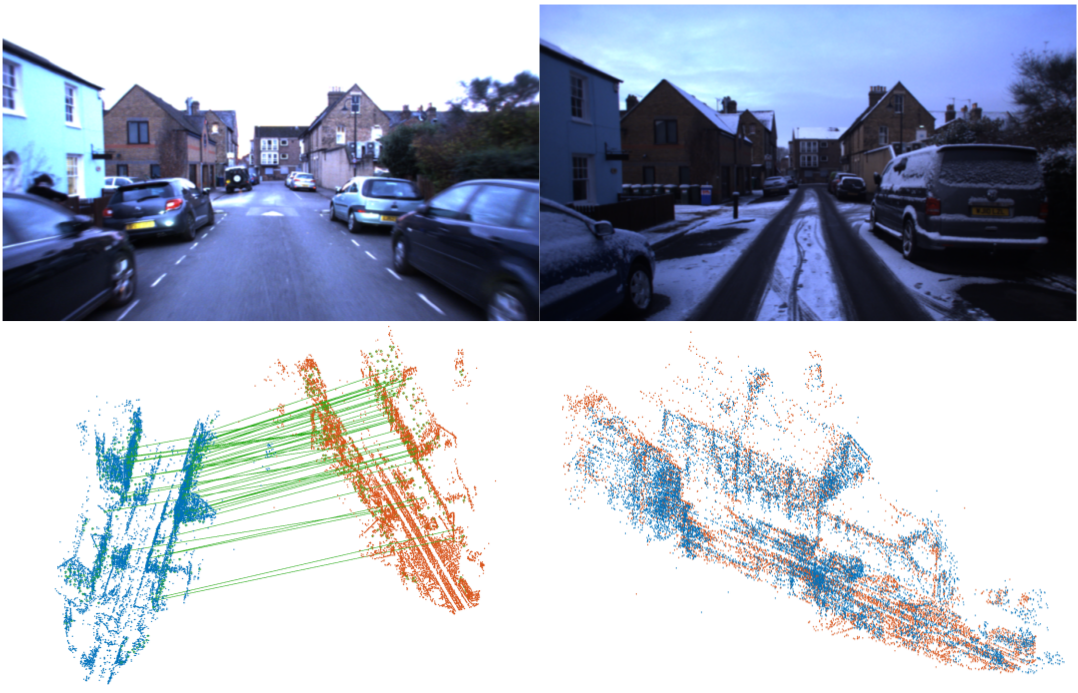
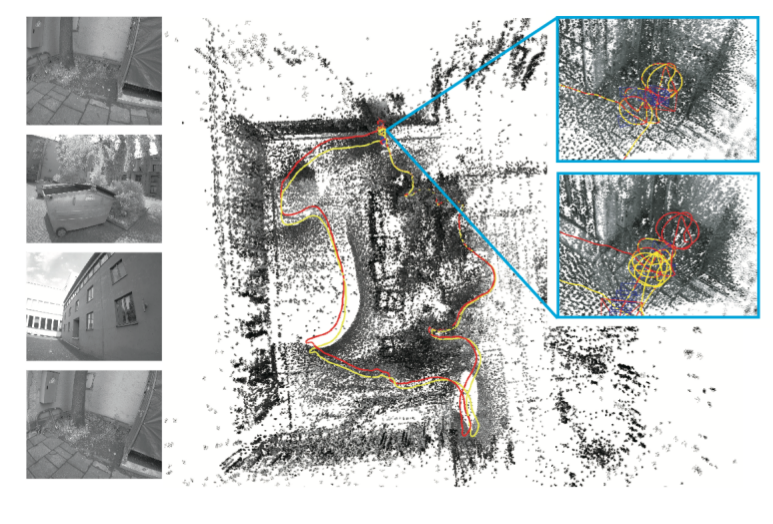
4Seasons: A Cross-Season Dataset for Multi-Weather SLAM in Autonomous Driving
Patrick Wenzel, Rui Wang, Nan Yang, Qing Cheng, Qadeer Khan,Lukas von Stumberg, Niclas Zeller, Daniel Cremers
GCPR, 2020
paper |
project page |
dataset |
video
|
|
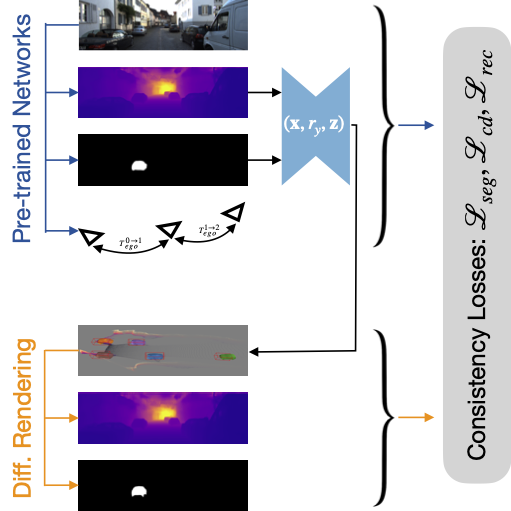
Learning Monocular 3D Vehicle Detection without 3D Bounding Box Labels
Lukas Koestler, Nan Yang, Rui Wang, Daniel Cremers
GCPR, 2020
paper |
supplement |
project page |
data |
video |
teaser video
|
|
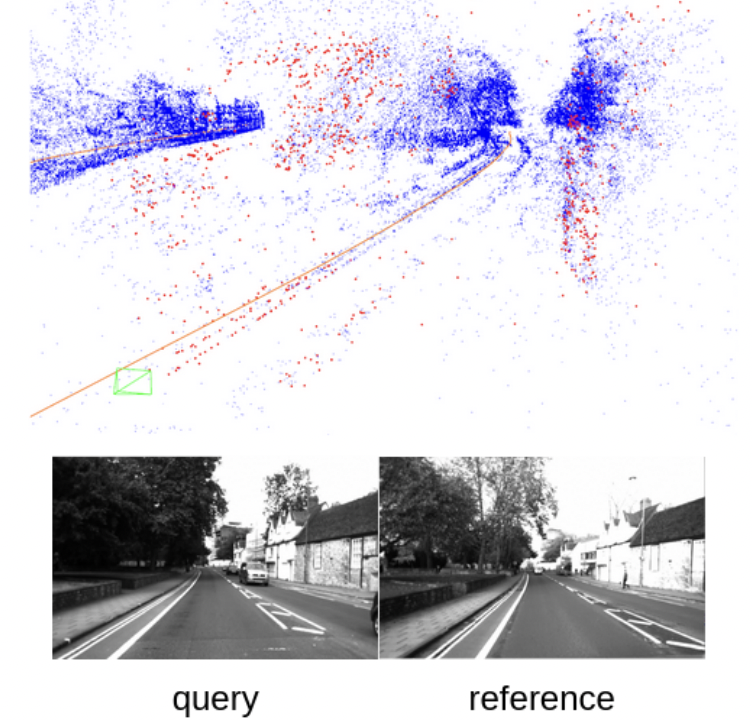
DH3D: Deep Hierarchical 3D Descriptors for Robust Large-Scale 6DoF Relocalization
Juan Du*, Rui Wang*, Daniel Cremers
ECCV, 2020 (*equal contribution) (Spotlight Presentation)
paper |
supplement |
project page |
code |
data |
video |
teaser video
|
|
D3VO: Deep Depth, Deep Pose and Deep Uncertainty for Monocular Visual Odometry
Nan Yang, Lukas von Stumberg, Rui Wang, Daniel Cremers
CVPR, 2020 (Oral Presentation)
paper & supplement |
project page |
video
|

|
DirectShape: Photometric Alignment of Shape Priors for Visual Vehicle Pose and Shape Estimation
Rui Wang, Nan Yang, Joerg Stueckler, Daniel Cremers
ICRA, 2020
paper |
supplement |
project page |
video |
presentation
|
|
Deep Virtual Stereo Odometry: Leveraging Deep Depth Prediction for Monocular Direct Sparse Odometry
Nan Yang, Rui Wang, Joerg Stueckler, Daniel Cremers
ECCV, 2020 (Oral Presentation)
paper |
supplement |
project page |
video |
presentation
|
|
Challenges in Monocular Visual Odometry: Photometric Calibration, Motion Bias and Rolling Shutter Effect
Nan Yang*, Rui Wang*, Xiang Gao, Daniel Cremers
RA-L and IROS, 2018 (*equal contribution)
paper
|
|
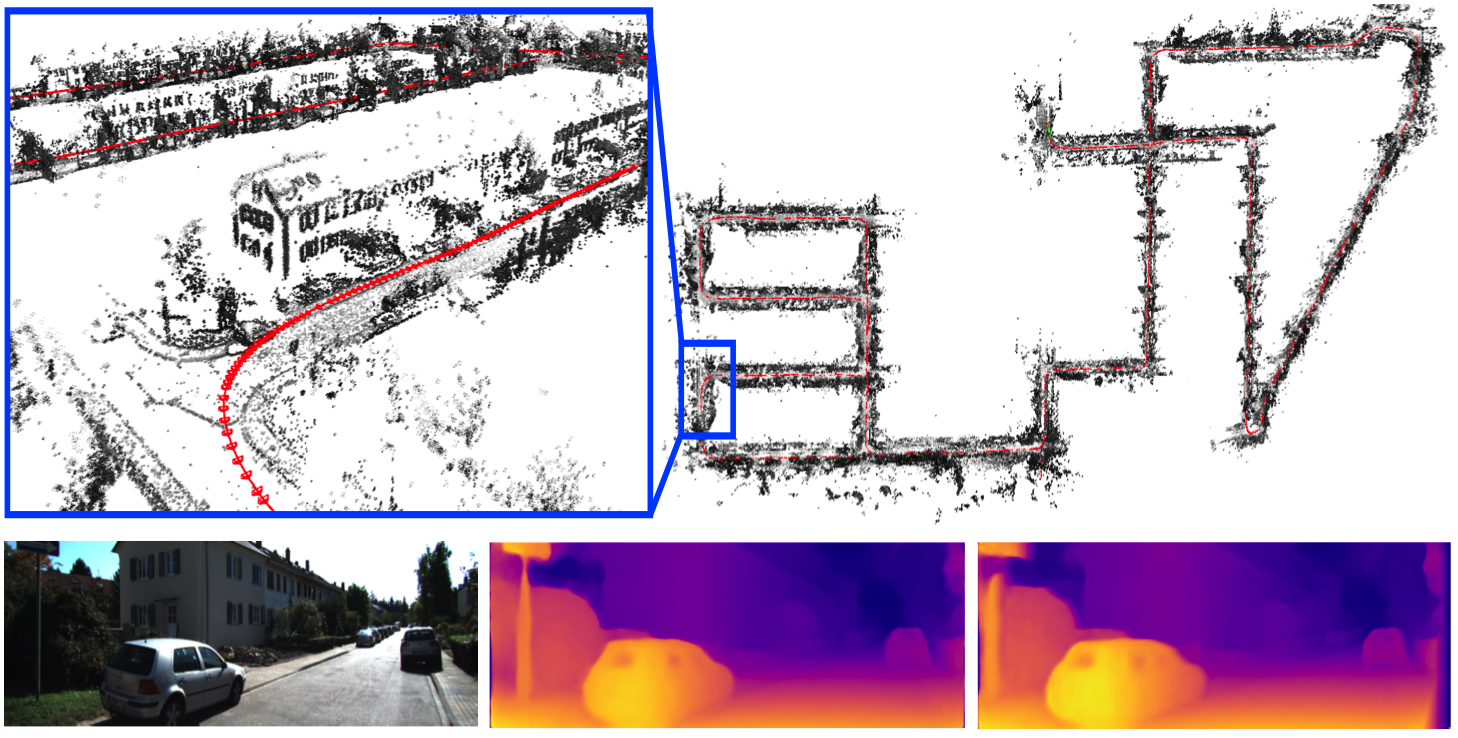
LDSO: Direct Sparse Odometry with Loop Closure
Xiang Gao, Rui Wang, Nikolaus Demmel, Daniel Cremers
IROS, 2018
paper |
project page |
video |
code
|
|
Online Photometric Calibration of Auto Exposure Video for Realtime Visual Odometry and SLAM
Paul Bergmann, Rui Wang, Daniel Cremers
RA-L and ICRA, 2018 (Best Vision Paper Award - Finalist)
paper |
project page |
video |
code
|
|
Stereo DSO: Large-Scale Direct Sparse Visual Odometry with Stereo Cameras
Rui Wang*, Martin Schwoerer*, Daniel Cremers
ICCV, 2017 (*equal contribution)
paper |
supplement |
project page |
video (VO) |
video (SLAM)
|
Patents
-
Visual localization
Rui Wang, Christoph Vogel, Marc Pollefeys
US Patent App. 18/420,753, 2025
-
Image sequence trajectories for visual odometry
Rui Wang, Marc Pollefeys, Weirong Chen
US Patent App. 18/400,708, 2025
-
Generating images for neural network training
Rui Wang, Le Chen, Marc Pollefeys
US Patent 12,488,571, 2025
-
Matching between 2D and 3D for direct localization
Johannes Schönberger, Rui Wang, Prune Truong, Marc Pollefeys
US Patent App. 18/055,722, 2024
-
Deep virtual stereo odometry
Nan Yang, Rui Wang
US Patent 11,064,178, 2021
|
|
Academic Services
Conference reviewer
CVPR, ICCV, ECCV, ICRA, IROS, AAAI, NeurIPS, ICLR, ICML
Journal reviewer
RA-L, T-RO, AURO, TMM, P&RS, Pattern Recognition, IJRR
Organizer
ECCV 2020 Workshop on Map-based Localization for Autonomous Driving
|
|